Jump back to chapter selection.
Table of Contents
2.1 The Convolution Sum
2.2 Convolution Properties of LTI Systems
2.3 Basic Properties
2.4 Causal LTI Systems Described by Differential Equations
2.5 Block Diagram Representation
2.6 Singularity Functions
2 Linear Time-Invariant Systems
In Chapter 1, a number of basic system properties were discussed. Two of these, linearity and time invariance, play a fundamental role in signal and system analysis for two major reasons. First, many physical processes possess these properties and thus can be modelled as linear time-invariant (LTI) systems. In addition, LTI systems can be analysed in considerable detail, providing both insight into their properties and a set of powerful tools that form the core of signal and system analysis.
One reason why LTI systems are of particular interest is that any such system possesses the superposition principle. As a consequence, if we can represent the input to an LTI system as a linear combination of a set of basic signals, we can then use superposition to compute the output of the system in terms of its responses to these basic signals. Unless stated otherwise, this chapter considers LTI systems.
2.1 The Convolution Sum
The so-called sifting property of the discrete-time unit impulse states that any discrete-time signal
Because the sequence
Now, consider an LTI system. Let
Due to the time-invariance property, if
Due to the linearity property (specifically, homogeneity and additivity), if the input is
This operation is called the convolution sum or the superposition sum, and it is commonly denoted by an asterisk:
This is a fundamental result: an LTI system is completely characterised by its response to a single unit impulse,
For continuous-time LTI systems, the same principles apply. The sifting property using the continuous-time unit impulse
If
2.2 Convolution Properties of LTI Systems
The convolution operation for LTI systems satisfies several important properties (shown here for continuous time, with analogous properties for discrete time):
- Commutativity: The order of convolution does not matter.
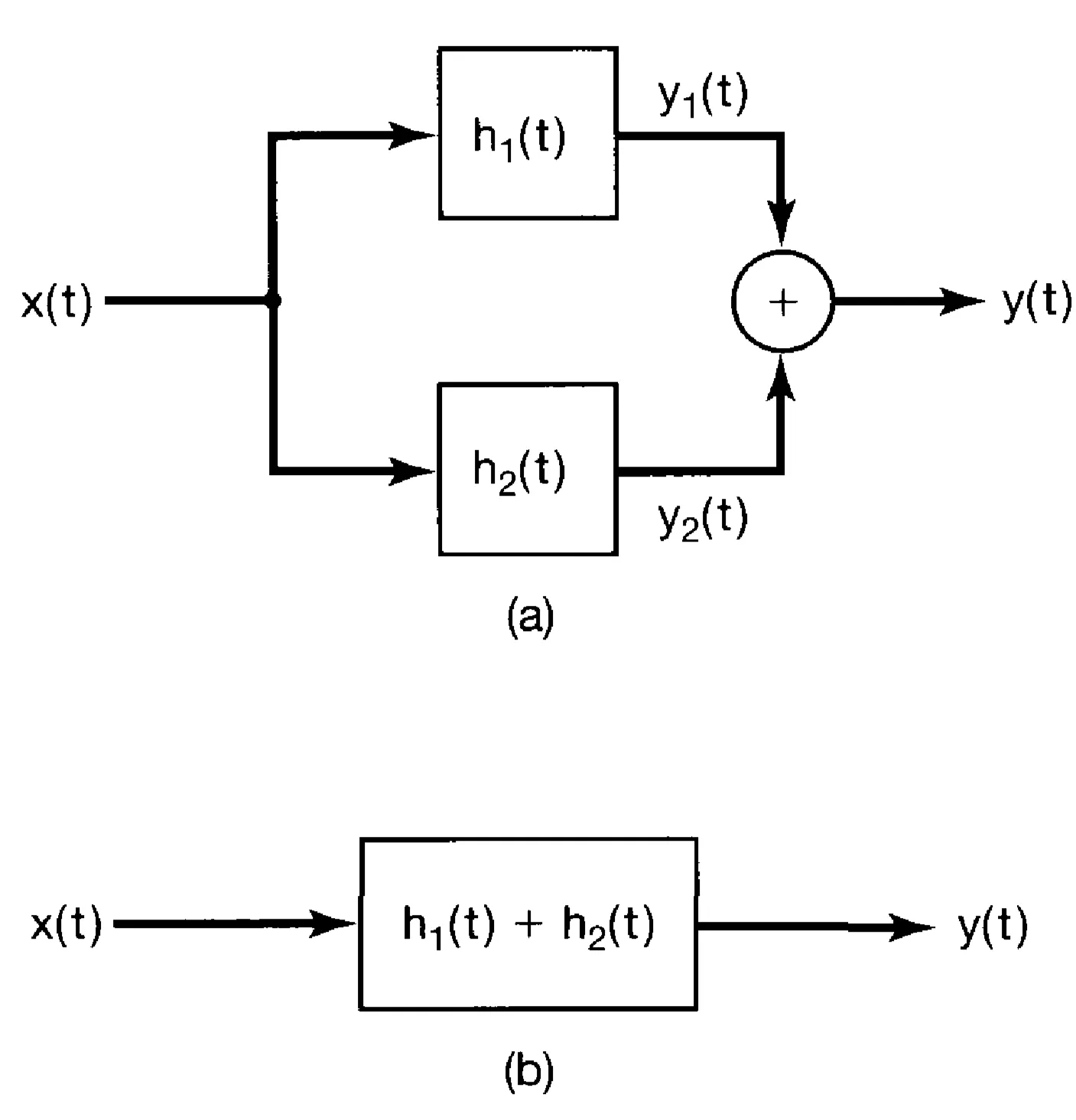
- Distributivity: Convolution distributes over addition. This means a system with an impulse response
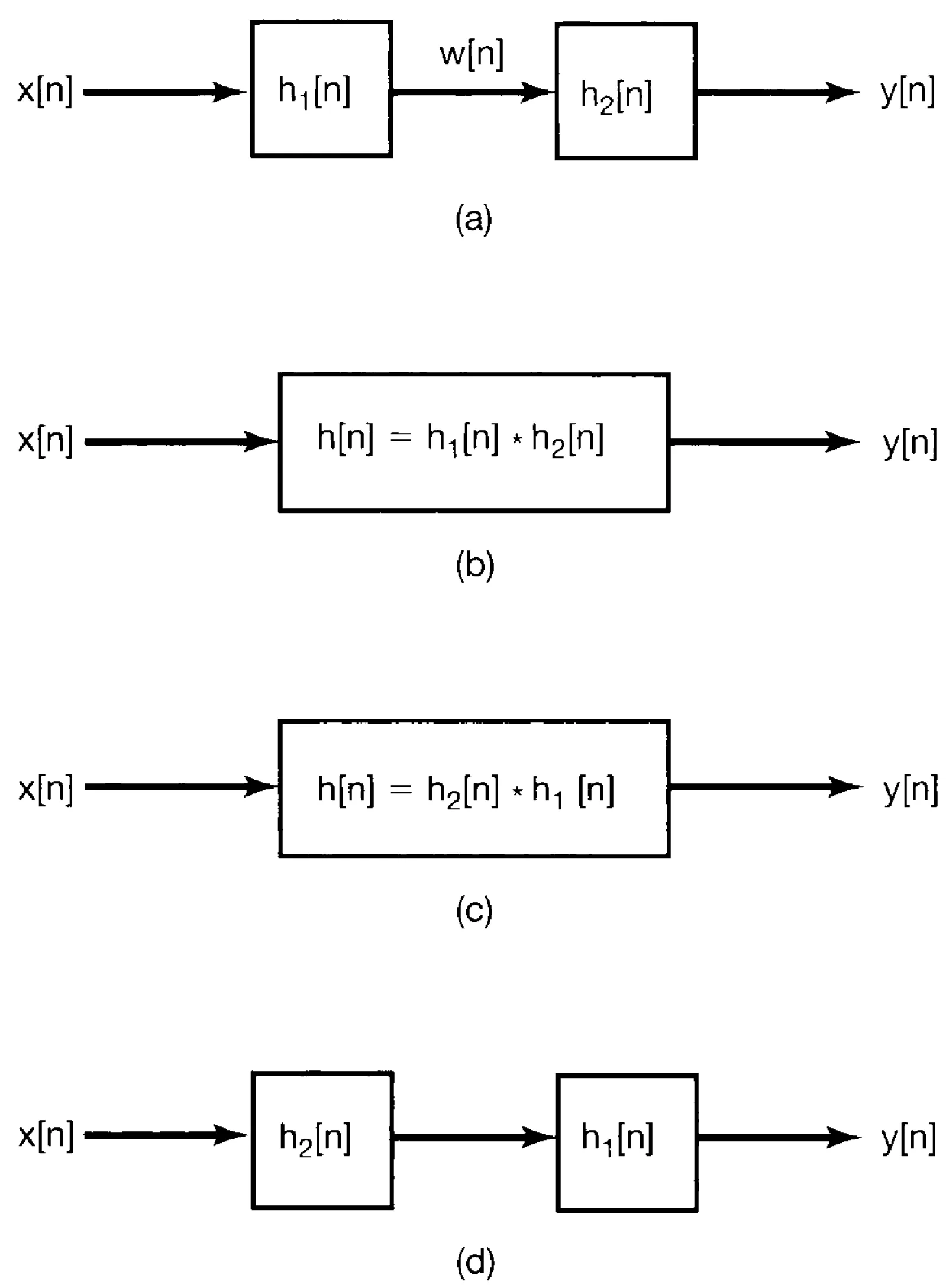
(parallel combination) convolved with is the same as convolved with plus convolved with . - Associativity: The order of cascading LTI systems does not matter.
Distributivity can be depicted graphically:
Similarly, associativity can be depicted graphically:
2.3 Basic Properties
The impulse response
2.3.1 Memory
An LTI system is memoryless if its output depends only on the current input. This implies that its impulse response must be of the form
If
2.3.2 Invertibility
An LTI system with impulse response
If an LTI system is invertible, its inverse is also an LTI system.
2.3.3 Causality
For an LTI system to be causal, its output
For linear systems (not necessarily time-invariant), causality is equivalent to the condition of initial rest: if the input
2.3.4 Stability
An LTI system is Bounded-Input, Bounded-Output (BIBO) stable if and only if its impulse response is absolutely summable (for discrete time) or absolutely integrable (for continuous time):
If this condition holds, and if an input is bounded,
2.3.5 Unit Step Response of an LTI System
Besides the impulse response, another basic but important characterisation of an LTI system is its unit step response,
For discrete time:
For continuous time:
Conversely, the impulse response can be obtained from the step response:
2.4 Causal LTI Systems Described by Differential and Difference Equations
An important class of continuous-time LTI systems is those whose input
These equations provide an implicit specification of the system. To obtain an explicit input-output expression (like the impulse response), one must solve the differential equation. The condition of initial rest (if the input is zero for
For
For
In discrete time, an analogous class of LTI systems is described by linear constant-coefficient difference equations:
The natural response of this system satisfies
Assuming
If
- If
, the equation becomes .
The impulse response isfor , and otherwise. Such systems are non-recursive and have a Finite Impulse Response (FIR). - If
(recursive systems), the impulse response generally has infinite duration, and these systems are referred to as Infinite Impulse Response (IIR) systems.
2.5 Block Diagram Representation
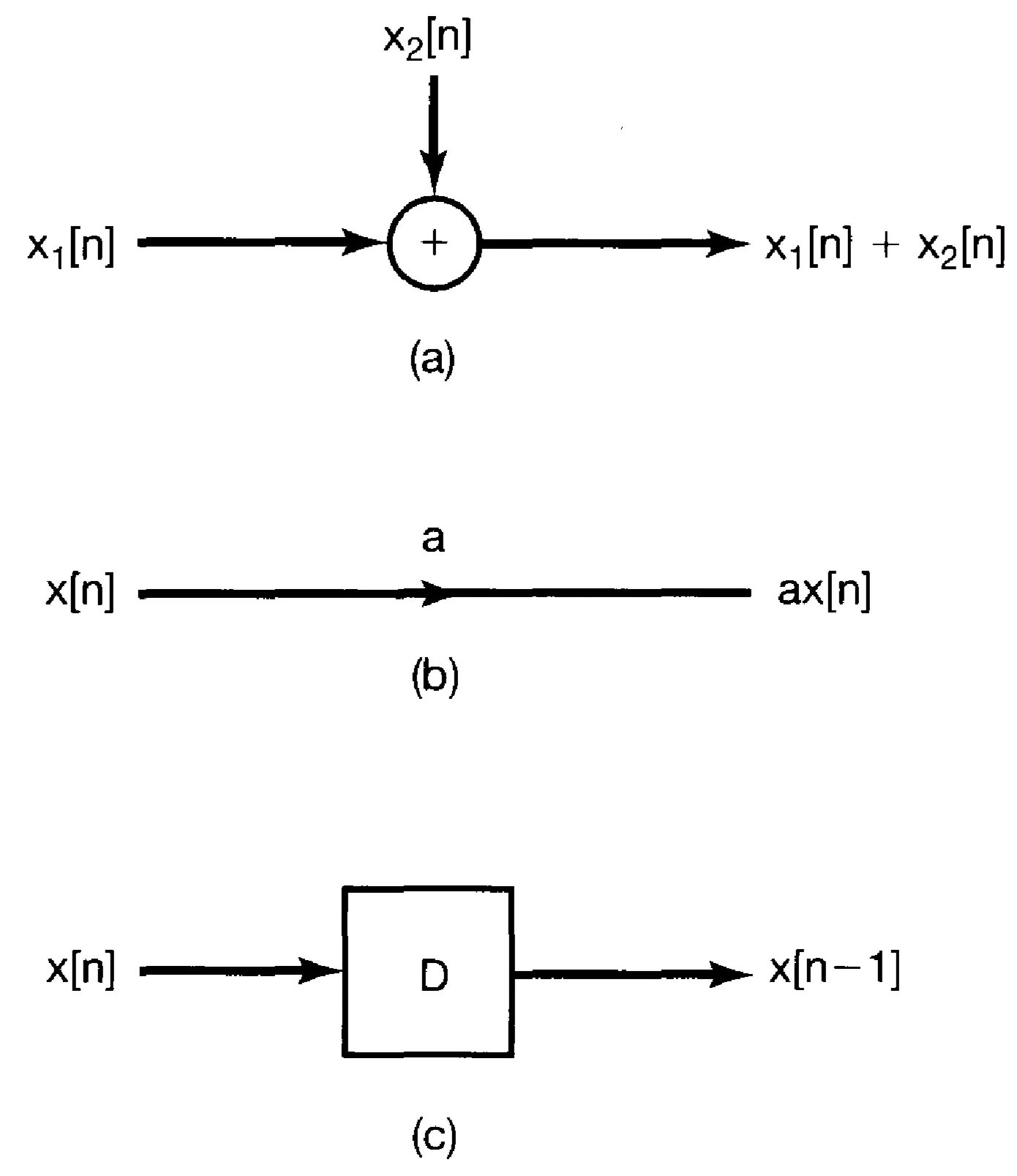
Systems described by linear constant-coefficient differential or difference equations can be represented using block diagrams. These diagrams provide a visual understanding of the system's structure and signal flow, and are valuable for both analysis and implementation. The basic elements are adders, multipliers (scalers), and delay elements (for discrete-time) or integrators (for continuous-time).
Consider the causal system described by the first-order difference equation (assuming
which can be rewritten as:
This equation requires three basic operations: addition/subtraction, multiplication by a constant, and a unit delay:
The block diagram representation of this equation is:
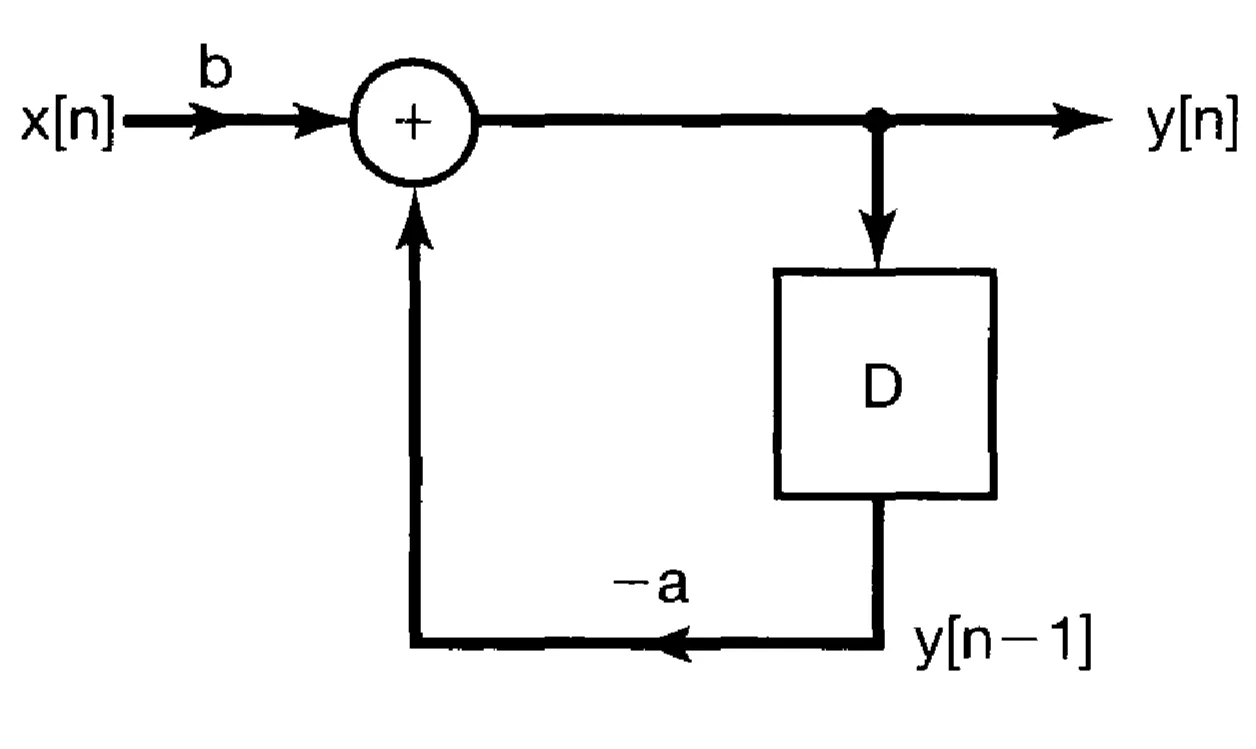
The feedback loop (output
For a continuous-time system described by a first-order differential equation:
One way to implement this would be
assuming
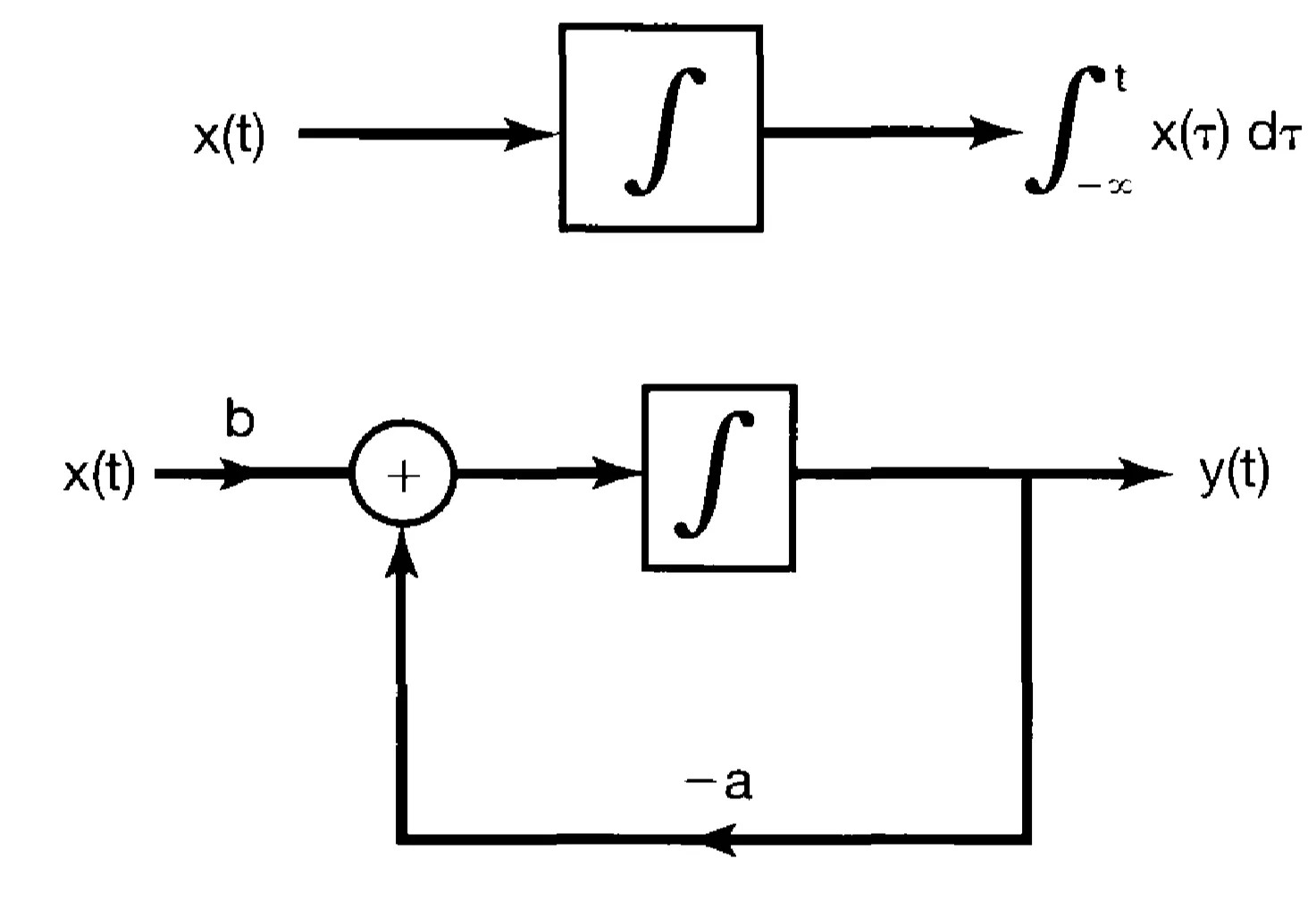
The integrator is inherently a memory element, as its output
2.6 Singularity Functions
From the sifting property, the unit impulse
Applying this to
The unit impulse
An equivalent operational definition, highlighting the sifting property, is that for any continuous function
The unit impulse belongs to a class of signals known as singularity functions. A key property is:
assuming
Higher-order singularity functions, such as the unit doublet
For example, the response to a unit doublet
The unit step
The unit ramp function
Higher-order integrals of
This can be expressed in closed form as:
The notation convention can be summarised: